Motor-driven
Ceiling Fan Controller

Key parameters
| Item | Parameters |
|---|---|
| Control method | Sensorless FOC vector control |
| Current sampling | 1-shunt/2-shunt current sampling |
| Initial position detection | 3-phase voltage vectors pulses injection |
| Angular estimation | Luenberger observer + Q-PLL |
| Speed range | 30 ~ 300 rpm |
| Motor start-up | at standstill, in tailwind, or in headwind |
| Protection mechanism | Stall, overcurrent, overvoltage and undervoltage protection |
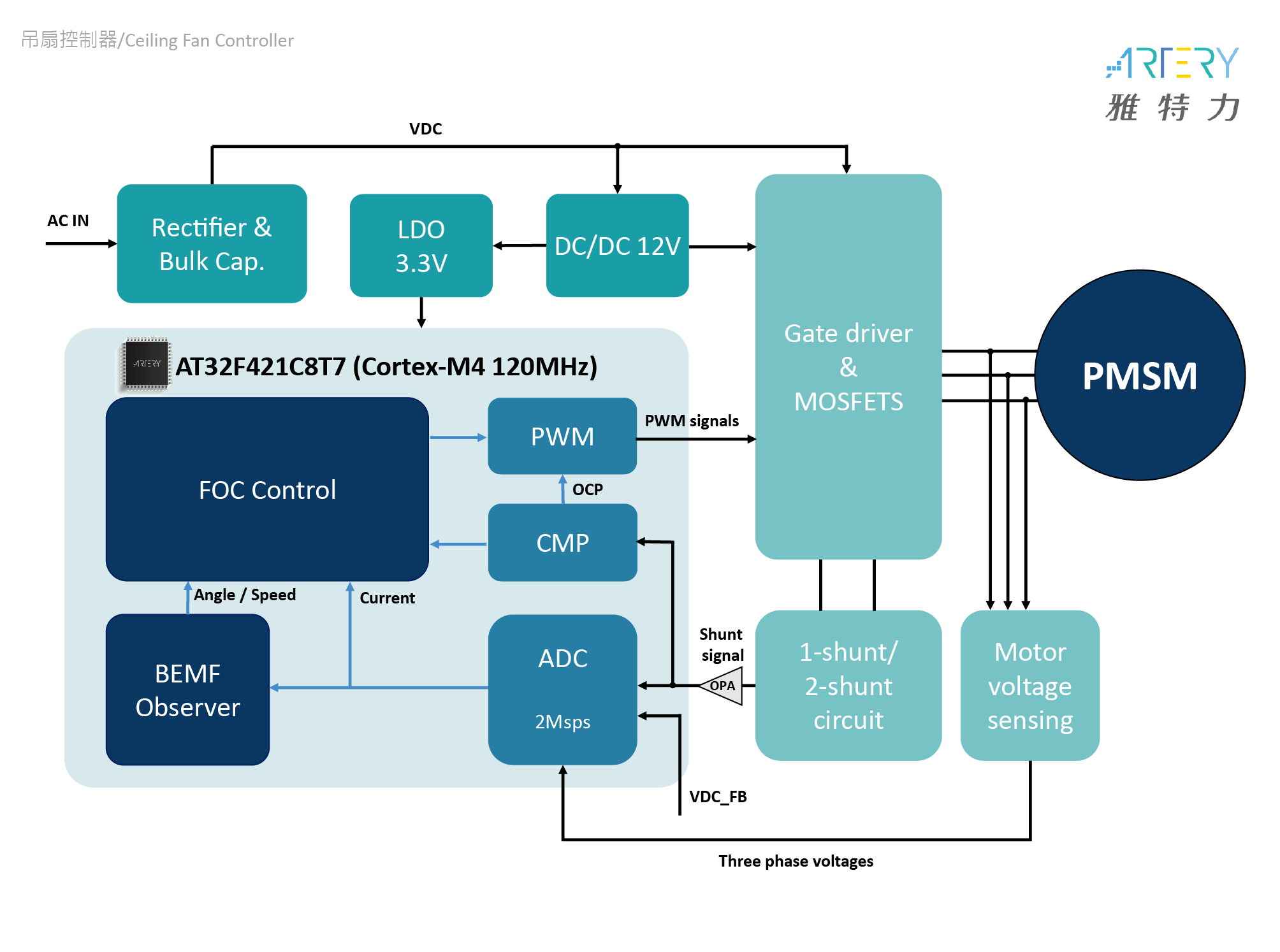
Block diagram